SpinalHDL internal datamodel
Introduction
This page provides documentation on the internal data structure utilized by SpinalHDL for storing and modifying the netlist described by users via the SpinalHDL API.
General structure
The following diagrams follow the UML nomenclature :
A link with a white arrow mean “base extend target”
A link with a black diamond mean “base contains target”
A link with a white diamond mean “base has a reference to target”
The * symbol mean “multiple”
The majority of the data structures are stored using double-linked lists, which facilitate the insertion and removal of elements.
There is a diagram of the global data structure :
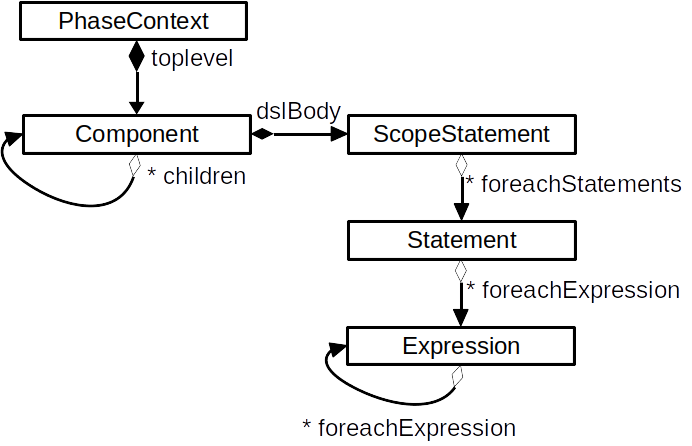
And here more details about the Statement class :
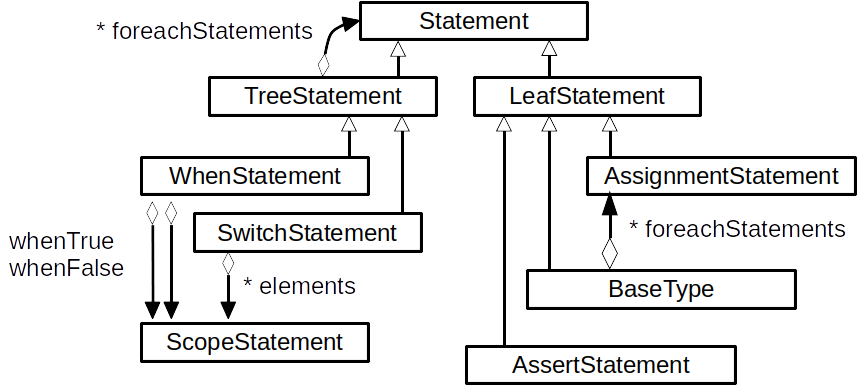
In general, when an element within the data model utilizes other expressions or statements, that element typically includes functions for iterating over these usages. For example, each Expression is equipped with a foreachExpression function.
When using these iteration functions, you have the option to remove the current element from the tree.
Additionally, as a side note, while the foreachXXX functions iterate only one level deep, there are often corresponding walkXXX functions that perform recursive iteration. For instance, using myExpression.walkExpression on ((a+b)+c)+d will traverse the entire tree of addition operations.
There are also utilities like myExpression.remapExpressions(Expression => Expression), which iterate through all the expressions used within myExpression and replace them with the one you provide.
More generally, most of the graph checks and transformations done by SpinalHDL are located in <https://github.com/SpinalHDL/SpinalHDL/blob/dev/core/src/main/scala/spinal/core/internals/Phase.scala>
Exploring the datamodel
Here is an example that identifies all adders within the netlist without utilizing shortcuts. :
object FindAllAddersManually {
class Toplevel extends Component {
val a,b,c = in UInt(8 bits)
val result = out(a + b + c)
}
import spinal.core.internals._
class PrintBaseTypes(message : String) extends Phase {
override def impl(pc: PhaseContext) = {
println(message)
recComponent(pc.topLevel)
def recComponent(c: Component): Unit = {
c.children.foreach(recComponent)
c.dslBody.foreachStatements(recStatement)
}
def recStatement(s: Statement): Unit = {
s.foreachExpression(recExpression)
s match {
case ts: TreeStatement => ts.foreachStatements(recStatement)
case _ =>
}
}
def recExpression(e: Expression): Unit = {
e match {
case op: Operator.BitVector.Add => println(s"Found ${op.left}
+ ${op.right}")
case _ =>
}
e.foreachExpression(recExpression)
}
}
override def hasNetlistImpact = false
override def toString = s"${super.toString} - $message"
}
def main(args: Array[String]): Unit = {
val config = SpinalConfig()
// Add a early phase
config.addTransformationPhase(new PrintBaseTypes("Early"))
// Add a late phase
config.phasesInserters += {phases =>
phases.insert(phases.indexWhere(_.isInstanceOf[PhaseVerilog]),
new PrintBaseTypes("Late"))
}
config.generateVerilog(new Toplevel())
}
}
Which will produces :
[Runtime] SpinalHDL v1.6.1 git head : 3100c81b37a04715d05d9b9873c3df07a0786a9b
[Runtime] JVM max memory : 8044.0MiB
[Runtime] Current date : 2021.10.16 20:31:33
[Progress] at 0.000 : Elaborate components
[Progress] at 0.163 : Checks and transforms
Early
Found (toplevel/a : in UInt[8 bits]) + (toplevel/b : in UInt[8 bits])
Found (toplevel/??? : UInt[? bits]) + (toplevel/c : in UInt[8 bits])
[Progress] at 0.191 : Generate Verilog
Late
Found (UInt + UInt)[8 bits] + (toplevel/c : in UInt[8 bits])
Found (toplevel/a : in UInt[8 bits]) + (toplevel/b : in UInt[8 bits])
[Done] at 0.218
Please note that in many cases, shortcuts are available. All the recursive processes mentioned earlier could have been replaced by a single one. :
override def impl(pc: PhaseContext) = {
println(message)
pc.walkExpression {
case op: Operator.BitVector.Add => println(s"Found ${op.left} + ${op.right}")
case _ =>
}
}
Compilation Phases
Here is the complete list of default phases, arranged in order, that are employed to modify, check, and generate Verilog code from a top-level component. :
If you, as a user, add a new compilation phase by using SpinalConfig.addTransformationPhase(new MyPhase()), this phase will be inserted immediately after the user component elaboration process, which is relatively early in the compilation sequence. During this phase, you can still make use of the complete SpinalHDL user API to introduce elements into the netlist.
If you choose to use the SpinalConfig.phasesInserters API, it’s essential to exercise caution and ensure that any modifications made to the netlist align with the phases that have already been executed. For instance, if you insert your phase after the PhaseInferWidth, you must specify the width of each node you introduce.
Modifying a netlist as a user without plugins
There are several user APIs that enable you to make modifications during the user elaboration phase. :
mySignal.removeAssignments : Will remove all previous := affecting the given signal
mySignal.removeStatement : Will void the existence of the signal
mySignal.setAsDirectionLess : Will turn a in / out signal into a internal signal
mySignal.setName : Enforce a given name on a signal (there is many other variants)
mySubComponent.mySignal.pull() : Will provide a readable copy of the given signal, even if that signal is somewhere else in the hierarchy
myComponent.rework{ myCode } : Execute myCode in the context of myComponent, allowing modifying it with the user API
For example, the following code can be used to modify a top-level component by adding a three-stage shift register to each input and output of the component. This is particularly useful for synthesis testing.
def ffIo[T <: Component](c : T): T = {
def buf1[T <: Data](that : T) = KeepAttribute(RegNext(that))
.addAttribute("DONT_TOUCH")
def buf[T <: Data](that : T) = buf1(buf1(buf1(that)))
c.rework {
val ios = c.getAllIo.toList
ios.foreach{io =>
if(io.getName() == "clk") {
// Do nothing
} else if(io.isInput) {
// allowDirectionLessIo is to disable the io Bundle linting
io.setAsDirectionLess().allowDirectionLessIo
io := buf(in(cloneOf(io).setName(io.getName() + "_wrap")))
} else if(io.isOutput) {
io.setAsDirectionLess().allowDirectionLessIo
out(cloneOf(io).setName(io.getName() + "_wrap")) := buf(io)
} else ???
}
}
c
}
You can use the code in the following manner: :
SpinalVerilog(ffIo(new MyToplevel))
Here is a function that enables you to execute the body code as if the current component’s context did not exist. This can be particularly useful for defining new signals without the influence of the current conditional scope (such as when or switch).
def atBeginningOfCurrentComponent[T](body : => T) : T = {
// Get the head of the current component symbols tree (AST in other words)
val body = Component.current.dslBody
// Now all access to the SpinalHDL API will be append to it (instead of the
// current context)
val ctx = body.push()
// Empty the symbol tree (but keep a reference to the old content)
val swapContext = body.swap()
// Execute the block of code (will be added to the recently empty body)
val ret = that
// Restore the original context in which this function was called
ctx.restore()
// append the original symbols tree to the modified body
swapContext.appendBack()
// return the value returned by that
ret
}
val database = mutable.HashMap[Any, Bool]()
def get(key : Any) : Bool = {
database.getOrElseUpdate(key, atBeginningOfCurrentComponent(False))
}
object key
when(something) {
if(somehow) {
get(key) := True
}
}
when(database(key)) {
...
}
This kind of functionality is, for instance, employed in the VexRiscv pipeline to dynamically create components or elements as needed.
User space netlist analysis
The SpinalHDL data model is also accessible and can be read during user-time elaboration. Here’s an example that can help find the shortest logical path (in terms of clock cycles) to traverse a list of signals. In this specific case, it is being used to analyze the latency of the VexRiscv FPU design.
println("cpuDecode to fpuDispatch " + LatencyAnalysis(vex.decode.arbitration.isValid, logic.decode.input.valid))
println("fpuDispatch to cpuRsp " + LatencyAnalysis(logic.decode.input.valid, plugin.port.rsp.valid))
println("cpuWriteback to fpuAdd " + LatencyAnalysis(vex.writeBack.input(plugin.FPU_COMMIT), logic.commitLogic(0).add.counter))
println("add " + LatencyAnalysis(logic.decode.add.rs1.mantissa, logic.get.merge.arbitrated.value.mantissa))
println("mul " + LatencyAnalysis(logic.decode.mul.rs1.mantissa, logic.get.merge.arbitrated.value.mantissa))
println("fma " + LatencyAnalysis(logic.decode.mul.rs1.mantissa, logic.get.decode.add.rs1.mantissa, logic.get.merge.arbitrated.value.mantissa))
println("short " + LatencyAnalysis(logic.decode.shortPip.rs1.mantissa, logic.get.merge.arbitrated.value.mantissa))
Here you can find the implementation of that LatencyAnalysis tool : <https://github.com/SpinalHDL/SpinalHDL/blob/3b87c898cb94dc08456b4fe2b1e8b145e6c86f63/lib/src/main/scala/spinal/lib/Utils.scala#L620>
Enumerating every ClockDomain in use
In this case, this is accomplished after the elaboration process by utilizing the SpinalHDL report.
object MyTopLevelVerilog extends App {
class MyTopLevel extends Component {
val cdA = ClockDomain.external("rawrr")
val regA = cdA(RegNext(False))
val sub = new Component {
val cdB = ClockDomain.external("miaou")
val regB = cdB(RegNext(False))
val clkC = CombInit(regB)
val cdC = ClockDomain(clkC)
val regC = cdC(RegNext(False))
}
}
val report = SpinalVerilog(new MyTopLevel)
val clockDomains = mutable.LinkedHashSet[ClockDomain]()
report.toplevel.walkComponents(c =>
c.dslBody.walkStatements(s =>
s.foreachClockDomain(cd =>
clockDomains += cd
)
)
)
println("ClockDomains : " + clockDomains.mkString(", "))
val externals = clockDomains.filter(_.clock.component == null)
println("Externals : " + externals.mkString(", "))
}
Will print out
ClockDomains : rawrr_clk, miaou_clk, clkC
Externals : rawrr_clk, miaou_clk